영어
영어 简体中文
简体中文 에스파 냐
에스파 냐 Sverige
Sverige
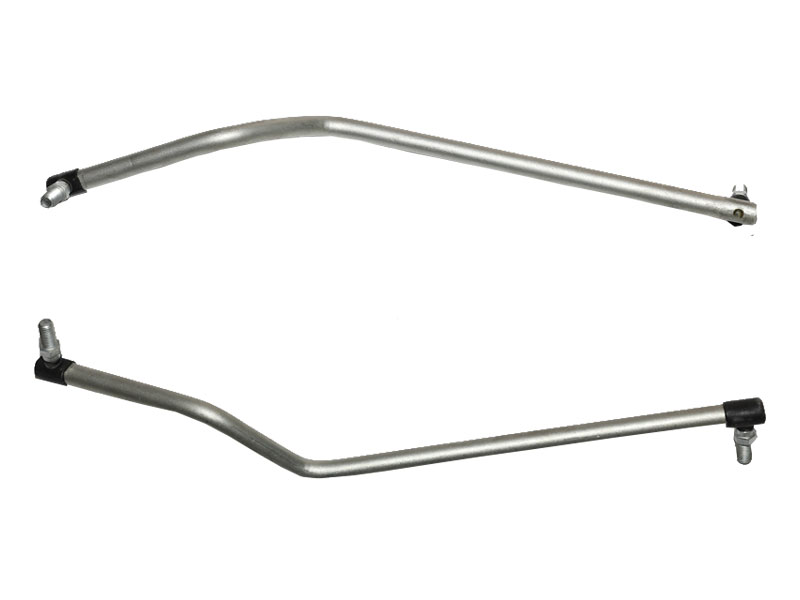
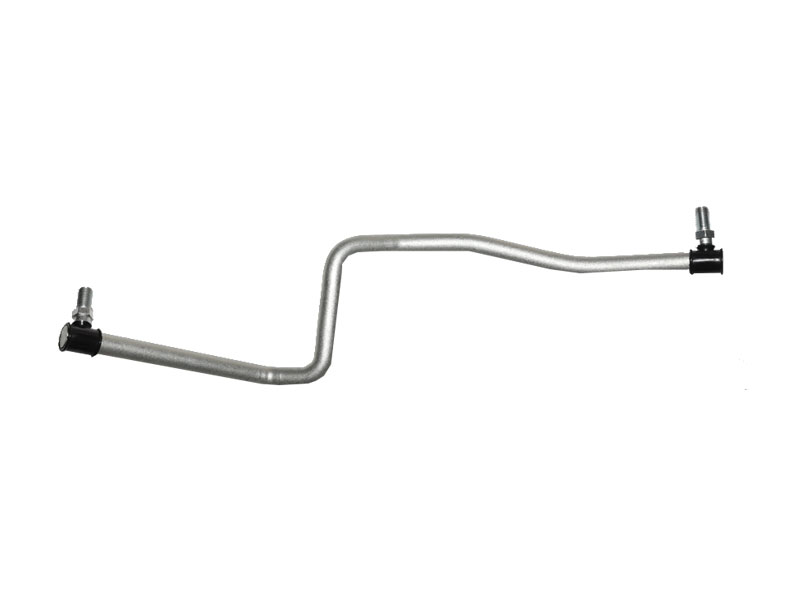
Pitman Arm은 스티어링 샤프트의 바닥에 연결된 스티어링 박스와 중앙/드래그 링크를 연결합니다. Pitman Arm은 스티어링 컬럼 또는 샤프트의 방사형 움직임을 자동차의 바퀴를 돌리는 선형 운동으로 변환합니다. 스티어링 휠이 회전하면 스티어링 샤프트의 바닥에있는 웜 기어가 치아 세트를 돌립니다.
이로 인해 Pitman Arm을 작동시킬 기어가 유도되어 스티어링 링키지가 바퀴를 돌릴 수 있습니다. 아이들러 암은 Pitman 암 맞은 편에 스티어링 장비를 유지합니다. 중앙/드래그 링크와 타이로드는 아이들러 암에 연결됩니다. 스티어링 휠이 회전하면 Pitman Arm이 활성화되어 평행 한 회전 동작으로 아이들러 암을 움직입니다.
이 일련의 동작은 궁극적으로 차량의 바퀴를 돌립니다. 타이로드는 최소한의 스티어링으로 바퀴를 똑바로 유지하고 스티어링의 인장 하중을 처리합니다. 내부 타이로드 엔드는 자동차의 중심선에 가깝습니다. 스티어링 랙의 움직임을 외부 타이로드 끝으로 전송합니다.
그만큼 스티어링 드래그 링크 내부 및 외부 타이로드 엔드는 기본적으로 각각 인라인 및 오른쪽 앵글 볼 조인트입니다. 드래그 링크의 한쪽 끝은 Pitman Arm에 연결되고 다른 쪽 끝은 아이들러 암에 부착됩니다. 그것은 피트 맨 팔의 움직임을 아이들러 팔로 전달합니다. 드래그 링크의 길이는 스티어링 비율에 영향을 미칩니다.
- CALL: +86-0571-86208501
- Email: [email protected]
- Fax: +86-0571-86156896